Introduction
LIDAR, short for Light Detection and Ranging. In recent years, LIDAR has emerged as a transformative force across a multitude of industries, revolutionizing everything from autonomous vehicles to archaeology. But what exactly is LIDAR, how does it work, and why is it so significant?
In this article, we will delve into the intricate world of LIDAR lens design, a crucial aspect of developing efficient and high-performing Light Detection and Ranging systems. As optical engineers, we understand the pivotal role that lenses play in the functionality and accuracy of LIDAR technology. From shaping laser beams to ensuring precise focusing and maximizing signal-to-noise ratios, every aspect of the lens design process contributes to the overall effectiveness of LIDAR systems.
Throughout this exploration, we will discuss key considerations such as lens material selection, curvature design, aberration correction, and the optimization of optical elements for specific LIDAR applications. By examining the principles and methodologies behind LIDAR lens design, we aim to provide valuable insights for engineers, researchers, and enthusiasts alike,
Not all optical systems require sharp images and low aberrations. While imaging systems use MTF, Strehl ratio and wavefront error to evaluate quality, there are other systems like solar collectors where there is no image formation and the goal is to maximize the captured optical power. This is the case with LIDARs (Light Detection and Ranging), fundamental components of autonomous vehicles.
LIDAR
LIDAR, which stands for Light Detection and Ranging, is a remote sensing technology that measures distances by sending out laser pulses and analyzing the light that is reflected back. It operates on the principle of measuring the time it takes for light to travel to an object and back, similar to radar but using light instead of radio waves.
Here’s a detailed breakdown of the basics of LIDAR technology:
- Emitter: A LIDAR system starts with an emitter, typically a laser, that generates short pulses of light. The laser emits pulses at a specific wavelength, often in the near-infrared range, which allows for better penetration through atmospheric conditions like fog, dust, or rain.
- Scanner or Mirror: In many LIDAR systems, a scanner or a moving mirror is used to direct the laser pulses over the area of interest. This scanning mechanism allows the LIDAR to cover a larger area or create a detailed 3D map by steering the laser pulses in different directions.
- Detector: After the laser pulse is emitted, the LIDAR system waits for the pulse to reflect off objects in the environment and return to the sensor. The detector then receives the reflected light, measuring its intensity and time of arrival.
- Time Measurement: By precisely measuring the time it takes for the laser pulse to travel to the object and back, the LIDAR system calculates the distance to the target. This measurement is based on the speed of light, which is constant, allowing for accurate distance calculations.
- Data Processing: Once the distances to various points in the environment are measured, the LIDAR system processes this data to generate a 3D point cloud or a 2D image representing the objects and surfaces within the scanned area. Advanced algorithms are often employed to filter out noise, correct for atmospheric effects, and enhance the quality of the resulting data.
- Applications: LIDAR technology finds applications across a wide range of industries and fields. It is commonly used in surveying and mapping to create detailed topographic maps, assess terrain features, and monitor environmental changes. LIDAR is also integral to autonomous vehicles for detecting obstacles and navigating complex environments. Other applications include forestry management, urban planning, archaeology, infrastructure inspection, and atmospheric sensing.
The Role of Lenses in LIDAR Systems
Lenses play a multifaceted role within various LIDAR technologies, each tailored to specific applications and operational requirements. Here’s a breakdown of their functions across different LIDAR systems:
- Time-of-Flight (ToF) LIDAR: In ToF LIDAR systems, lenses are crucial for directing and focusing the emitted laser pulses toward the target area. These lenses help ensure that the laser beam remains collimated (maintains its diameter) over long distances, minimizing beam divergence and maximizing the range of the system. Additionally, lenses are used to collect and focus the reflected light onto the receiver, enabling accurate detection of the time delay between the transmitted and received pulses, which is used to calculate the distance to the target.
- Frequency-Modulated Continuous Wave (FMCW) LIDAR: FMCW LIDAR systems rely on the frequency modulation of the laser beam to determine range. Lenses are employed to precisely shape and focus the laser beam, ensuring that it maintains its frequency modulation characteristics over the desired range. By accurately controlling the beam profile and divergence, lenses help optimize the system’s range resolution and sensitivity to detect small frequency shifts caused by target movement.
- Flash LIDAR: Flash LIDAR systems capture an entire scene instantaneously by illuminating the entire field of view with a single laser pulse. Lenses in flash LIDAR systems are utilized to efficiently distribute the emitted light across the field of view, ensuring uniform illumination and minimizing energy loss. Additionally, lenses help focus the incoming light onto the detector array, enabling high-resolution imaging of the scene. Sophisticated lens designs may also incorporate beam steering capabilities to adjust the direction of the emitted light, allowing for customizable scanning patterns and coverage.
- Differential Absorption LIDAR (DIAL): DIAL systems are used for remote sensing of atmospheric gases by measuring the absorption of laser light at specific wavelengths. Lenses in DIAL LIDAR systems serve to collimate and focus the laser beams emitted at different wavelengths, ensuring precise alignment and overlap at the target area. By controlling the beam divergence and spatial overlap, lenses enable accurate measurement of gas concentrations and atmospheric parameters with high sensitivity and resolution.
Flash LIDAR
Flash LIDAR, also known as flash LIDAR imaging or flash LIDAR sensing, is a type of LIDAR technology that captures an entire scene instantaneously using a single laser pulse. Unlike traditional scanning LIDAR systems, which require time-consuming point-by-point scanning, flash LIDAR offers rapid data acquisition and real-time imaging capabilities. This makes it particularly well-suited for applications that require high-speed, high-resolution 3D mapping and imaging.
Design Considerations and Applications of Flash LIDAR:
- High-Speed Data Acquisition: One of the primary design considerations for flash LIDAR is the need for high-speed data acquisition. The system must be able to capture and process large amounts of data in real-time to generate 3D point clouds or images of the scene instantaneously.
- Wide Field of View: Flash LIDAR systems typically require wide field-of-view (FOV) capabilities to capture large areas in a single pulse. This necessitates the use of wide-angle optics or specialized lens designs that can efficiently distribute the emitted light across the entire FOV without sacrificing resolution or accuracy.
- High Spatial Resolution: Achieving high spatial resolution is essential for detailed imaging and mapping applications. Designing lenses with high-quality optics and minimal aberrations is crucial to ensure sharp and accurate imaging of objects within the scene.
- Compact and Lightweight Design: Flash LIDAR systems are often deployed on airborne platforms, such as drones or helicopters, where size and weight constraints are critical. Designing compact and lightweight lenses is essential to minimize the overall size and weight of the system while maintaining performance and durability.
Specific Challenges and Solutions in Designing Lenses for Flash LIDAR:
- Uniform Illumination: Ensuring uniform illumination across the entire FOV is challenging in flash LIDAR systems. Traditional lens designs may result in uneven light distribution, leading to variations in intensity and image quality. One solution is to employ custom lens designs with specialized optical elements that optimize light distribution and minimize vignetting.
- Minimizing Distortions: Distortions such as barrel distortion or pincushion distortion can affect the accuracy of 3D reconstructions in flash LIDAR imaging. Designing lenses with low distortion characteristics, as well as employing advanced distortion correction algorithms in post-processing, can help mitigate these effects and improve the overall accuracy of the system.
- Reducing Chromatic Aberration: Chromatic aberration, which causes different wavelengths of light to focus at different points, can degrade image quality and color accuracy in flash LIDAR systems. Utilizing lens materials with low dispersion properties and incorporating corrective elements such as achromatic doublets or apochromatic lenses can help minimize chromatic aberration and maintain color fidelity.
- Optimizing Depth of Field: Achieving a suitable depth of field is essential for capturing sharp and well-focused images across varying distances in flash LIDAR applications. Designing lenses with adjustable apertures or incorporating autofocus mechanisms can help optimize depth of field and ensure consistent image quality throughout the scene.
In the image below, we can see the emission optical system for a flash LIDAR. The EWOD (electrowetting) prism is used to scan the laser beam on a 15.6-degree arc. The triplet lens creates a telecentric beam on the fisheye, and the fisheye increases the FOV to almost 180-degree arc

Scanning LIDAR
Scanning LIDAR systems operate by emitting laser pulses and scanning the environment using a rotating or oscillating mirror, prism, or other scanning mechanism. These systems capture spatial data point-by-point, generating detailed 3D maps or images of the surroundings. Here’s an elaboration on their mechanics and uses:
Mechanics of Scanning LIDAR Systems:
- Emitter: Scanning LIDAR systems typically utilize a laser emitter to generate short pulses of laser light. The emitted laser pulses are directed towards the target area to measure distances.
- Scanning Mechanism: The scanning mechanism in scanning LIDAR systems controls the direction of the emitted laser pulses. This mechanism can include rotating mirrors, oscillating mirrors, or other types of scanning devices. By rapidly scanning the laser beam across the field of view, the LIDAR system captures spatial data point-by-point.
- Detector: Similar to other LIDAR systems, scanning LIDAR systems use a detector to measure the intensity of the laser light that is reflected back from objects in the environment. The detector captures the return signals, allowing the system to calculate distances and generate a 3D representation of the scene.
- Data Processing: Once the spatial data is collected, scanning LIDAR systems process the information to create detailed 3D maps, images, or point clouds of the environment. Advanced algorithms are often employed to filter out noise, correct for distortions, and enhance the quality of the final output.
Uses of Scanning LIDAR Systems:
- Surveying and Mapping: Scanning LIDAR systems are widely used for topographic mapping, urban planning, and land surveying. They can quickly and accurately capture terrain features, building structures, and other geographic elements to create detailed maps and models.
- Autonomous Vehicles: Scanning LIDAR plays a crucial role in the navigation and obstacle detection systems of autonomous vehicles, such as self-driving cars and drones. By continuously scanning the surroundings, these systems can detect and avoid obstacles in real-time, ensuring safe and efficient navigation.
- Forestry and Environmental Monitoring: Scanning LIDAR is used for forest inventory, biomass estimation, and environmental monitoring. It can accurately measure tree heights, canopy structure, and vegetation density, providing valuable insights for forestry management and ecological studies.
- Infrastructure Inspection: Scanning LIDAR is employed for the inspection and maintenance of infrastructure assets such as bridges, railways, and power lines. It can detect structural defects, assess damage, and monitor changes over time, helping to ensure the safety and reliability of critical infrastructure.
Recent Advancements and Trends in Scanning LIDAR Lens Design:
- Improved Optical Performance: Recent advancements in lens materials, coatings, and manufacturing techniques have led to lenses with improved optical performance, including higher resolution, better contrast, and reduced distortion. These advancements enhance the accuracy and reliability of scanning LIDAR systems.
- Compact and Lightweight Designs: There is a growing trend towards developing compact and lightweight lenses for scanning LIDAR systems, particularly for applications in drones, robotics, and handheld devices. Miniaturized lenses enable portable and versatile scanning LIDAR solutions without compromising performance.
- Customized Lens Designs: With the increasing demand for specialized scanning LIDAR applications, there is a shift towards customized lens designs tailored to specific requirements. Custom lenses may incorporate aspherical surfaces, diffractive elements, or multi-element configurations optimized for particular scanning patterns or environmental conditions.
- Integration with Other Sensors: Scanning LIDAR systems are often integrated with other sensors such as cameras, radar, and inertial measurement units (IMUs) to provide complementary data for enhanced perception and navigation capabilities. Lens designs for integrated sensor systems must consider factors such as sensor alignment, synchronization, and data fusion.
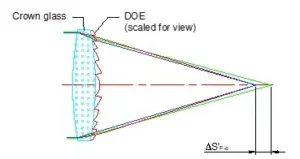
An example of a scanning LIDAR system is shown in the figure below. In it, we have a focusing lens that focuses light on a MEMS and the MEMS reflects light into a f-theta lens. The f-theta lens creates an image on a flat plane and it consists of three optical elements (with an effective focal length of 100 mm). The next stage is a wide angle group that increases the FOV to 120-degree arc.

Applications
LIDAR technology, with its ability to accurately measure distances and create detailed 3D maps of the environment, finds applications across a diverse range of fields beyond those already mentioned. Here are several additional applications:
- Archaeology: LIDAR is revolutionizing archaeological research by enabling the discovery and mapping of ancient sites, settlements, and cultural heritage sites. By scanning terrain from aircraft or drones, archaeologists can uncover hidden structures, decipher landscape features, and gain insights into past civilizations without disturbing the ground.
- Disaster Management: LIDAR plays a crucial role in disaster management and response efforts. It can be used to assess the extent of damage caused by natural disasters such as earthquakes, floods, and landslides, enabling rapid response and resource allocation. LIDAR data also aids in planning evacuation routes, identifying high-risk areas, and assessing infrastructure vulnerabilities.
- Meteorology and Climate Studies: LIDAR technology is employed in atmospheric research to study weather patterns, air quality, and climate change. LIDAR systems can measure atmospheric parameters such as humidity, temperature, wind speed, and aerosol concentration with high precision, providing valuable data for weather forecasting, climate modeling, and environmental monitoring.
- Wildlife Conservation: LIDAR is used in wildlife conservation efforts to monitor and protect endangered species and their habitats. It can be used to survey animal populations, track migration patterns, and assess habitat suitability. LIDAR data helps conservationists make informed decisions about land management, conservation planning, and wildlife protection initiatives.
- Cultural Heritage Preservation: LIDAR technology is employed in cultural heritage preservation to document and digitally preserve historical sites, monuments, and artifacts. High-resolution LIDAR scans capture detailed 3D models of cultural landmarks, enabling virtual tours, restoration planning, and conservation efforts to safeguard cultural heritage for future generations.
- Precision Agriculture: LIDAR technology is utilized in precision agriculture to optimize crop management practices and improve agricultural productivity. LIDAR-equipped drones or ground-based systems can collect data on crop health, soil moisture levels, and terrain elevation, allowing farmers to make data-driven decisions regarding planting, irrigation, fertilization, and pest control.
- Geology and Mining: LIDAR is widely used in geology and mining applications for geological mapping, mineral exploration, and mine site characterization. LIDAR data provides valuable insights into terrain morphology, geological structures, and mineral resources, aiding in the planning and development of mining operations while minimizing environmental impact.
- Urban Planning and Development: LIDAR technology is instrumental in urban planning and development projects, enabling city planners to assess infrastructure needs, analyze land use patterns, and plan for sustainable growth. LIDAR-derived data supports decision-making processes related to transportation, infrastructure development, zoning regulations, and disaster resilience in urban areas.
Future Trends in LIDAR Technology
The future of LIDAR technology holds exciting possibilities, driven by ongoing advancements in hardware, software, and applications. Here are some speculative developments and potential applications:
- Miniaturization and Integration: LIDAR systems are likely to become smaller, lighter, and more energy-efficient, enabling integration into a wider range of devices and platforms. Miniaturized LIDAR sensors could be embedded in smartphones, wearables, drones, and autonomous vehicles, democratizing access to 3D sensing capabilities and unlocking new applications in consumer electronics, navigation, and augmented reality.
- Enhanced Resolution and Range: Future LIDAR systems may feature higher resolution sensors, enabling finer details to be captured in 3D maps and images. Advances in laser technology and signal processing techniques could extend the range and precision of LIDAR sensors, allowing for more accurate measurements over longer distances. This would open up new possibilities in fields such as remote sensing, geospatial mapping, and infrastructure inspection.
- Multi-Wavelength LIDAR: Multi-wavelength LIDAR systems, capable of emitting and detecting light at multiple wavelengths simultaneously, could provide valuable insights into the composition and properties of objects and materials. By analyzing the spectral characteristics of reflected light, multi-wavelength LIDAR could enable applications in environmental monitoring, geological exploration, and material identification.
- Fusion with Other Sensing Modalities: Integration of LIDAR with other sensing modalities such as cameras, radar, and inertial sensors could enhance the capabilities of autonomous systems and robotic platforms. Sensor fusion techniques could enable more robust perception and navigation in challenging environments, improving the safety and reliability of autonomous vehicles, robots, and drones.
- Quantum LIDAR: Emerging quantum technologies, such as quantum sensing and quantum computing, hold promise for revolutionizing LIDAR systems. Quantum LIDAR, leveraging quantum-enhanced measurement techniques and entangled photon sources, could offer unprecedented sensitivity and precision, enabling applications in quantum-enhanced imaging, metrology, and secure communication.
- AI-driven Data Processing: Machine learning and artificial intelligence algorithms will play an increasingly important role in processing and interpreting LIDAR data. AI-driven data processing techniques could automate the extraction of meaningful insights from large-scale LIDAR datasets, accelerating analysis and decision-making in fields such as urban planning, disaster response, and environmental monitoring.
- Biomedical Imaging and Healthcare: LIDAR technology holds potential applications in biomedical imaging and healthcare, enabling non-invasive diagnosis and monitoring of diseases. LIDAR-based imaging systems could be used for 3D scanning of tissues, organs, and anatomical structures, providing valuable information for surgical planning, medical diagnostics, and personalized treatment approaches.
- Space Exploration: LIDAR technology could play a critical role in future space exploration missions, facilitating autonomous navigation, hazard detection, and terrain mapping on celestial bodies such as the Moon, Mars, and asteroids. LIDAR-equipped spacecraft and rovers could survey and characterize planetary surfaces with unprecedented detail, supporting scientific exploration and resource prospecting efforts.
Conclusions
Lens design stands as a cornerstone in the realm of LIDAR technology, imbuing systems with critical functionality, precision, and adaptability. These lenses play an indispensable role in sculpting laser beams, directing light towards targets, and capturing reflected signals, ultimately ensuring high-resolution, accurate distance measurements, and detailed 3D imaging.
Crucially, lens designs must be tailored to specific LIDAR applications, considering variables like field of view, range, resolution, and environmental conditions. Addressing challenges such as uniform illumination, distortion correction, chromatic aberration, and depth of field optimization, lens designers employ advanced optical techniques and materials to mitigate these hurdles, ensuring the reliability and efficiency of LIDAR measurements.
Recent advancements in lens design include enhancements in optical performance, the pursuit of compact and lightweight designs, customization for specialized applications, and integration with complementary sensor technologies. These trends underscore the ongoing evolution and expansion of LIDAR’s capabilities across diverse industries and applications, affirming the indispensable role of innovative lens design in shaping the future impact of LIDAR technology.
Related Articles
Uncover the intricate process of designing stereo lens pairs. This article delves into the technicalities and considerations crucial for creating effective stereo imaging in applications like LIDAR systems.
Steering Mirrors In LIDAR Systems
Explore the role of steering mirrors in LIDAR systems. Learn about their design, functionality, and how they enhance the accuracy and efficiency of LIDAR technology.
LIDAR Lens Design Insights: Frequently Asked Questions
What are the key considerations in designing lenses for LIDAR systems?
Key considerations include lens material, optical resolution, focal length, and compatibility with LIDAR’s light wavelength. The design must ensure minimal optical aberrations and high precision for accurate distance measurement.
How do Flash LIDAR and Scanning LIDAR differ in lens requirements?
Flash LIDAR typically requires lenses that can handle a wide field of view, while Scanning LIDAR lenses need to accommodate rapid movements and precise focusing for scanning purposes.
Can LIDAR lens designs be standardized or do they need to be custom for each application?
While there are standard lens designs, custom designs are often required for specific applications to meet unique performance criteria like range, resolution, and field of view.